RM7TDMI 레퍼런스 매뉴얼을 살펴보면 다음과 같이 칩코어의 블럭다이어그램을 찾을 수 있다.
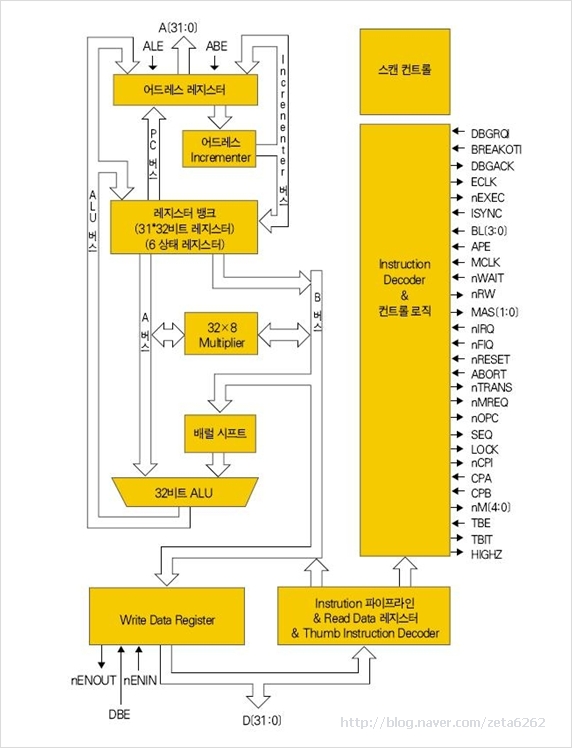
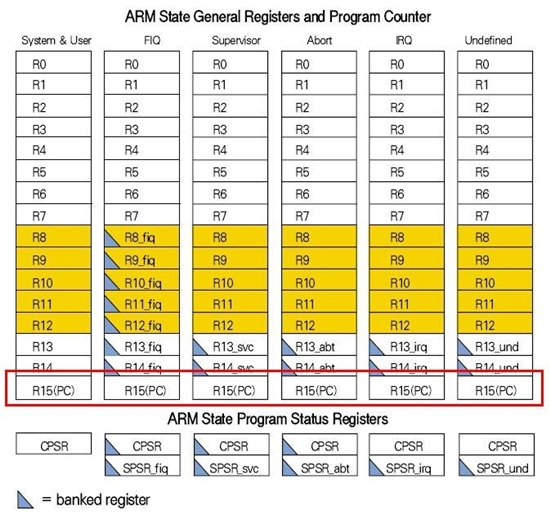
위 그림에서 좌측부분을 보면 디바이스가 프로그램메모리에 접근하기 위해 PC(프로그램 카운터) 정보를 레지스터로부터 가져옴을 볼 수 있는데, 이로부터 resolve하는 어드레스의 크기는 A31:0의 총 32비트임을 보여준다. 즉, SAM7S가 인식하는 메모리의 어드레스 공간은 총 32비트(약 4.3GB)로 구성됨을 알 수 있다. 또한, PC는 32비트의 주소값을 저장해야 하므로, 아래의 그림에서 ARM7TDMI 코어의 동작모드(총 7가지)에 관계없이 레지스터15(R15)를 PC를 위해 사용한다.
SAM7S는 폰노이만 구조로서, 코어에 내장된 물리적 메모리(플래시 및 SRAM)와 각종 I/O 주변장치등을 매모리맵 I/O 방식(Memory Mapped I/O)으로 맵핑시켜 두었다. (아래 그림 참고)
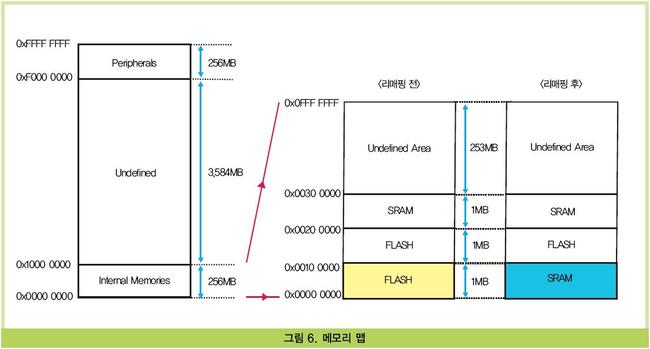
우선 위의 그림의 좌측에서와 같이, 32비트의 어드레스 공간은 크게 3개의 영역으로 나뉘어져 있다. 하위 256MB는 물리적 메모리를 위한 영역으로 할당되어 있고, 상위 256MB는 주변장치를 위한 I/O 공간으로 할당되어 있다. 이들 사이의 3.5GB 정도의 공간은 미정의상태로서 사용되지 않는다.
여기서 하위 256MB의 물리적메모리를 위한 공간을 다시 자세히 살펴보면, 3개의 1MB 영역과 253MB의 미사용영역으로 이루어져 있음을 알 수 있다.(위 그림에서 우측 참고) 여기서, SAM7S의 프로그램메모리(플래시)는 0x10_0000 번지부터 맵핑되어 있으며, 데이터메모리(SRAM)는 0x20_0000 번지부터 맵핑되어 있다. 플래시와 SRAM의 공간은 각각 1MB의 영역만큼 할당되어 있으나, 플래시메모리와 SRAM의 용량은 디바이스마다 그 크기가 정해져 있기 때문에 실제 사용되는 공간은 디바이스의 메모리 용량에 의해 결정된다. (예컨데, SAM7S256의 경우 플래시메모리의 크기가 256KB이므로 256KB의 공간만큼만 사용가능)
디바이스가 리셋이 되면 PC는 0x0000_0000 번지로 점프하므로 이 곳은 아무런 메모리도 할당되어 있지 않아 왠지 모순이 되는 것 같다. 그러나, SAM7S에는 메모리 리맵핑(Memory Re-mapping) 기능이 제공되고 있어, 디폴트로 0x10_0000 번지의 플래시영역이 0x00_0000 번지에 리맵핑되어 있다. 따라서, 리셋이 되면 SAM7S는 플래시메모리의 내용을 읽으면서 부팅이 된다. 반면에,MC_RCR이란 레지스터의 RCB비트를 1로 세팅하면 재배치 명령(Remmap Command)이 실행되어 0x20_0000 번지의 SRAM영역이 0x00_0000 번지로 리맵핑되어 SRAM의 내용을 읽으면서 부팅이된다.
SAM7S의 플래시메모리는 Single Plane으로 구성되어 있기 때문에, 플래시메모리의 내용을 실행하면서 플래시-라이트를 할 수는 없다. 때문에, SAMBA와 같은 경우 이 리맵핑 기능을 이용하여 SRAM영역으로 SAMBA 코드를 복사한 뒤 SRAM영역에서 부팅하여 플래시메모리에 펌웨어를 라이팅하게 된다.




